| 型号 | 导程(mm) | 行程范围(mm) | 重复定位精度(mm) | 最大可承载重量 |
额定推力 (N) |
最高速度 (mm/s) |
||||||||||||||||||||||
| 水平(Kg) | 垂直(Kg) | |||||||||||||||||||||||||||
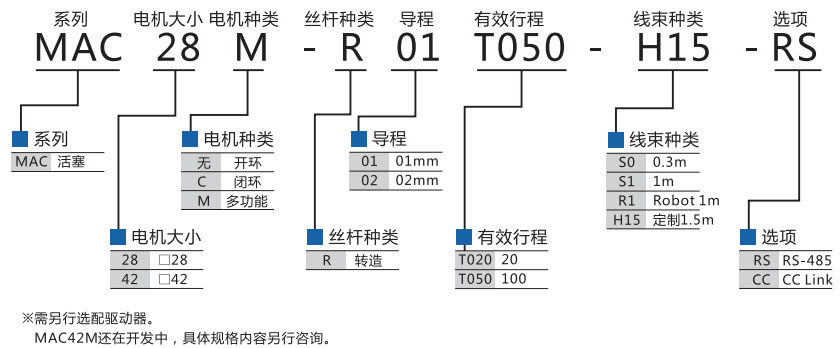
| MAC28M-R01①-②-③ | 1 | 50 | ±0.010 | 5.0 | 2.5 | 185 | 50 | |||||||||||||||||||||
| MAC28M-R02①-②-③ | 2 | 50 | ±0.010 | 2.5 | 1.3 | 92 | 50 | |||||||||||||||||||||
【备注】:
2.. 最大可承载重量是5mm/sec时实际驱动的重量。
3. 最大推力是以1mm/sec驱动时的实测值。
4. 最高速度是水平方向,无负载时的运行速度。
5. 另行提供用户手册以及控制软件。
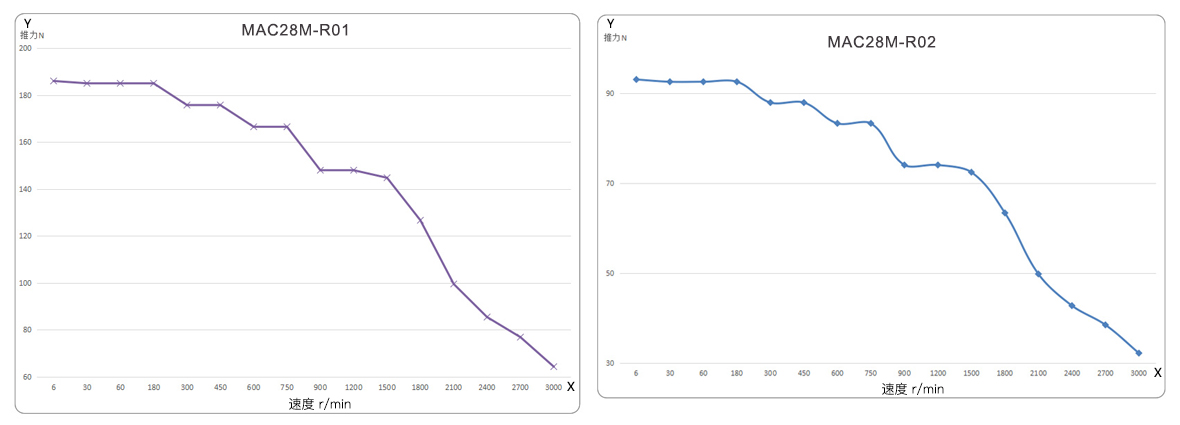
1.测试条件:DC24V,1.0A,加减速 30,000pps/s;测试方向:垂直
2.上述推力仅为实测值,并非保证值。
| 输入电压 | DC 24V±10% | ||
| 控制方法 | 32位DSP闭环控制 | ||
| 多轴驱动 | Max 16轴 链式连接 | ||
| 位置表 | 64种运动命令步骤(连续、循环、跳转等等) | ||
| 电流功耗 | Max 500Ma(不包含电机电流) | ||
| 分辨率 | 500~20000PPR | ||
| 报警功能 | 十余种报警功能,详细内容见使用说明 | ||
| 旋转方向 | CW/CCW(可选择) | ||
| 输入信号 | LIMIT+、 LIMIT-、 1个可编程输入(光耦) | ||
| 输出信号 | 1个可编程输出 | ||
| 通讯协议 | RS-485 串行通讯 | ||
| 通讯速率 | 9600~921600bps | ||
| 位置控制 | 增量模式/绝对模式 数据范围:-134217727~134217727(pulse) | ||
| 脉冲速度 | Max 500kpps | ||
| 回原点 | 原点传感器,Z相,±LIMIN 传感器 | ||
| GUI | Windows 用户使用界面 | ||
| 软件 | Windows 2000/xp/7/8/10 运动函数库(DLL) | ||
| 环境温度 | 使用:0~55℃ 存储:-20~70℃ | ||
| 环境湿度 | 使用:35~85%RH 存储:10~90%RH |